Troubleshooting
What You Should Try First
Make sure your workspace is built
$ build_ros
and make sure your workspace is sourced after you added new packages/nodes!
$ source ~/.zshrc
I cannot run my node!
Problem
You get a python exceptions with the last line of
Traceback (most recent call last):
...
being the following error
OSError: [Errno 8] Exec format error: <path/to/your/node>
Solution
You have forgotten to add
#!/usr/bin/env python3
as first line of your node. Better add it now.
Problem
You get the output
No executable found
Solution
Double check that the node exists, gets installed (CMakeLists.txt, see Run A Node), and is executable.
If you have forgotten to make it executable (most likely reason of the before mentioned causes), run
$ chmod +x <PATH_TO_YOUR_NODE>
I cannot start the simulation!
Problem
You are using Ubuntu in a Virtual Machine and Gazebo dies after a few seconds and you get the following Output:
[gz-4] terminate called after throwing an instance of ‘Ogre::RenderingAPIException’
[gz-4] what(): OGRE EXCEPTION(3:RenderingAPIException): Fragment Program 100000002PixelShader_ps failed to compile. See compile log above for details. in GLSLShader::compile at ./.obj-aarch64-linux-gnu/gz_ogre_next_vendor-prefix/src/gz_ogre_next_vendor/RenderSystems/GL3Plus/src/GLSL/OgreGLSLShader.cpp (line 361)
The VM is trying to render with hardware to which is does not have full access.
Solution
Run the following command:
$ echo ‘export LIBGL_ALWAYS_SOFTWARE=1’ >> ~/.zshrc \
&& . ~/.zshrc
My Robot/Gazebo is doing crazy stuff!
Problem
The robot shoots of to e.g. -1032839 m, Gazebo is doing weird stuff, things aren’t behaving at all how you would expect them.
This can happen if old Gazebo processes are still running in the background.
For example, this may happen after closing the simulation window, after a crash, or after stopping a launch file with Crtl + C.
Solution
Close all leftover Gazebo processes.
We recommend using htop as a task manager for this.
It is easier to use than the default top command, but it is usually not installed by default.
Install it with:
$ sudo apt update && apt install htop
Start the task manager with
$ htop
Search for Gazebo processes by pressing F3 and typing
gz
It should look similar to this:
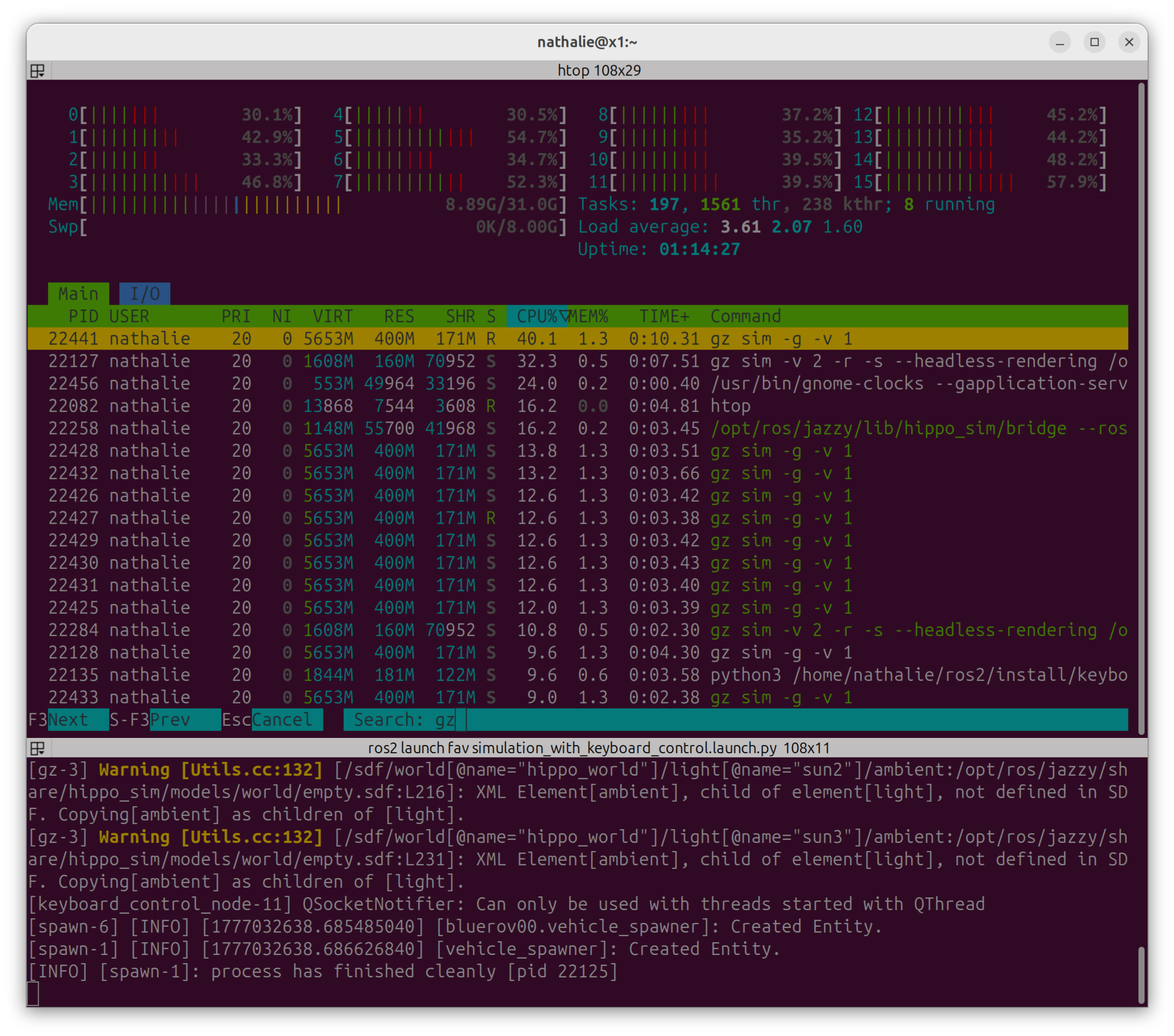
Look for processes such as
gz
gz sim
gzserver
gzclient
gazebo
Select the process with the arrow keys and press F9 to kill it.
First try SIGTERM and press Enter.
If the process does not disappear, press F9 again, (select SIGKILL if necessary), and press Enter.
Repeat this until no old Gazebo processes are left.
You can leave htop by pressing q. Then start the simulation again.
If this does not fix it
If restarting Gazebo cleanly does not solve the problem, then the issue is probably not a leftover process.
Some other possible causes are:
a controller applies very large forces, velocities, or accelerations
ROS2 “multiple host interference”: you see someone else’s control commands as well - see below.
My robot reacts although I am not controlling it!
Problem
The robot moves although you are not sending commands, or it reacts in a way that does not match your own node.
This can happen if someone else on the same network is running ROS2 with the same topic names.
By default, ROS 2 uses ROS_DOMAIN_ID=0.
If several students use the same network and the same domain ID, their nodes may discover each other and communicate.
For example, another student may publish control commands to the same topic that your robot is listening to.
Solution
Use a unique ROS_DOMAIN_ID for your own simulation.
Choose a number between 1 and 101.
Do not use 0 in class unless instructed otherwise.
For example, to use domain ID 42 temporarily in the current terminal, run:
$ export ROS_DOMAIN_ID=42
You must do this before starting your ROS2 nodes or launch files.
To make this permanent for every new terminal, add it to your ~/.zshrc:
$ echo 'export ROS_DOMAIN_ID=42' >> ~/.zshrc
$ source ~/.zshrc
Check that it is set correctly with:
$ echo $ROS_DOMAIN_ID
You should see:
42
Important
All terminals that belong to your own simulation must use the same ROS_DOMAIN_ID.
If you are working with multiple computers, for example a robot computer and a laptop, both computers must use the same ROS_DOMAIN_ID if they are supposed to communicate.
In the lab, we use ROS_DOMAIN_ID=0.
After changing the domain ID, stop all running ROS2 nodes and Gazebo processes, open a new terminal, and start the simulation again.