Available Sensors
The BlueROV2 has a number of on-board sensors available for you to use.
Inertial Measurement Unit
The Inertial Measurement Unit (IMU) is on-board the Pixhawk and consists of accelerometer, gyroscope and magnetometer. The accelerometer measures linear accelerations and the gyroscope measures angular velocities.
The IMU data is processed on the FCU by PX4’s estimator. Since the accelerometer also measures accelerations due to gravity, the vehicle’s pitch and roll angle can be estimated well using the IMU data. For estimating a drone’s yaw angle, usually a compass (magnetometer) is used. However, since we are deploying the BlueROV2 in a steel tank, the compasses’ measurements are not usable.
For accurate yaw estimation, external data has to be fused into PX4’s estimator.
Pressure Sensor
A pressure sensor located in the upper enclosure’s end cap can measure the (water) pressure. This can be used to estimate the vehicle’s height.
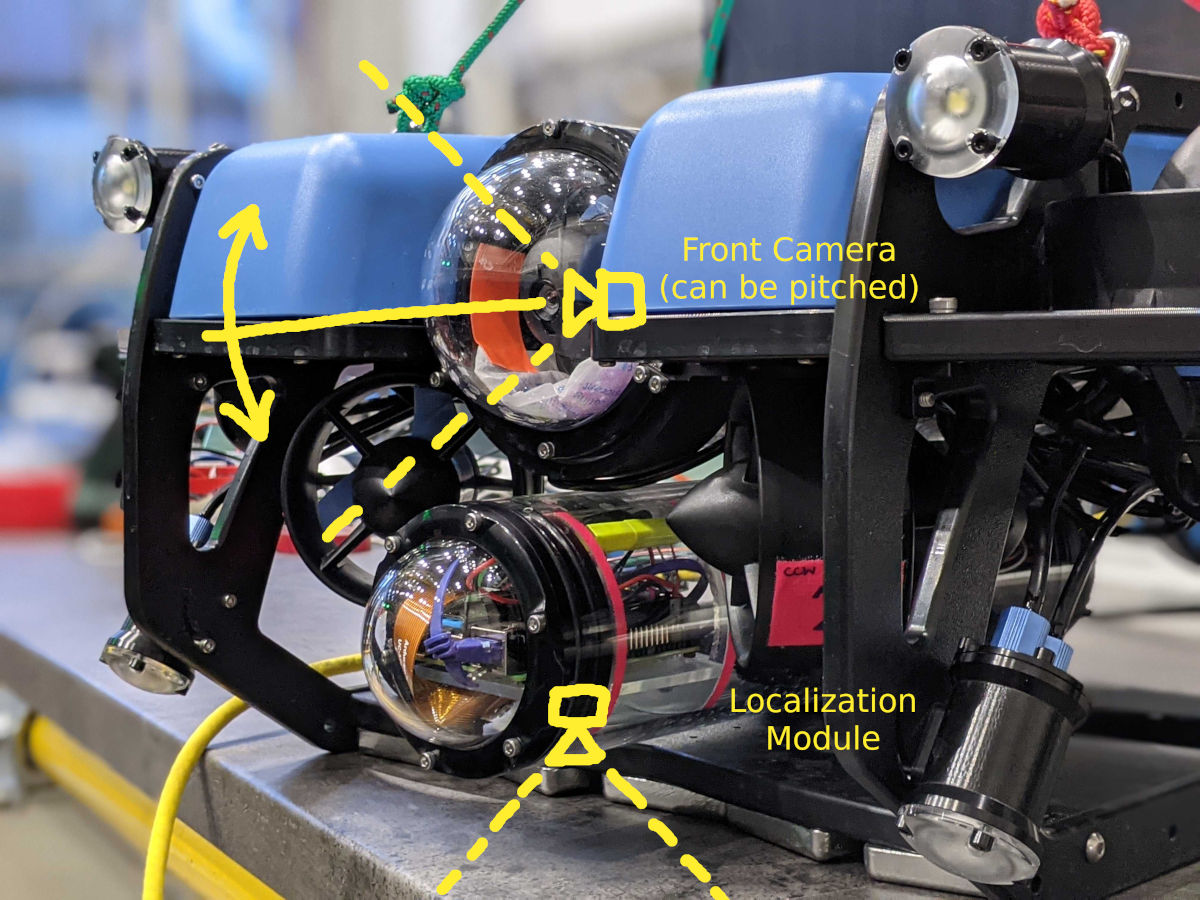
Cameras
The BlueROV2 comes with a camera facing forward. This camera’s pitch angle is actuated by a servo. We have added a second camera facing downward which is mainly used for our localization using AprilTag markers on the tank floor.