Class Overview
General Information
In this class, we explore the exciting field of mobile robotics using the example of underwater robots. However, everything you will learn in this class will be transferable to any other kind of mobile robot!
During the class, we will get in touch with the whole robotics pipeline, starting from sensing over perception, to planning, and control and actuation. An important focus will lie on gaining hands-on robotics experience using real underwater robots in simulation and experiment. You will learn about state-of-the-art robotic tools such as ROS2/Gazebo and their usage for simulation and experiments.
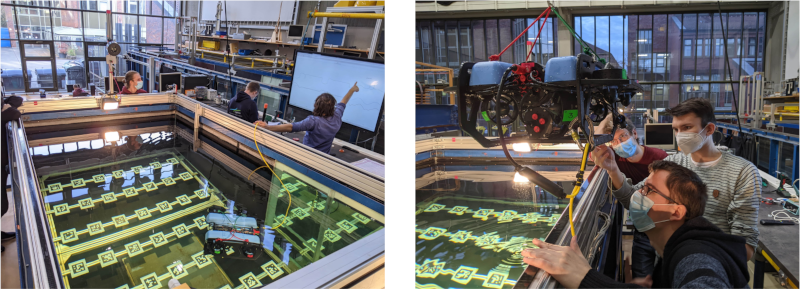
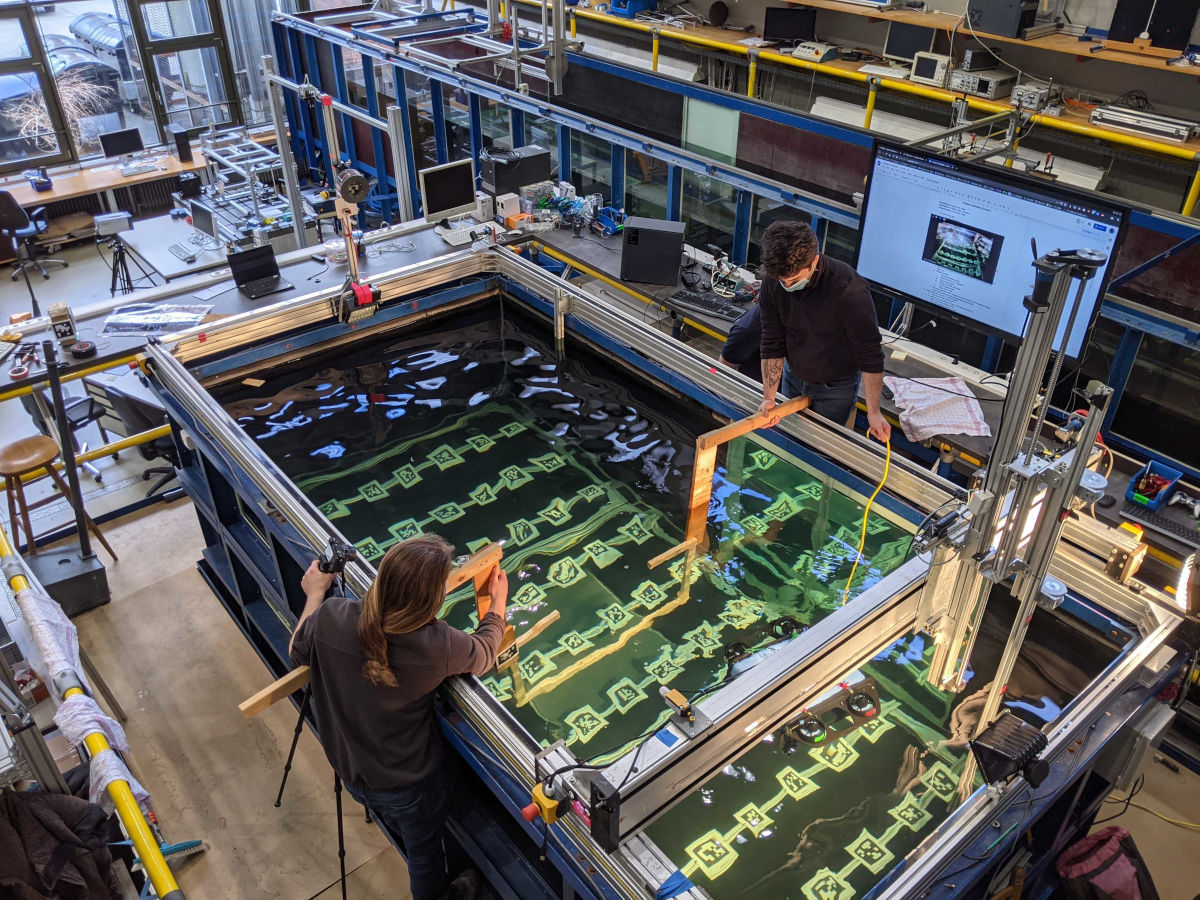
Underwater Robotics Testbed at the Institute of Mechanics and Ocean Engineering.
Our class is based on the challenge-based-learning concept. This means you will explore the challenges in mobile robotics on your own during several guided assignments and a final group project.
While the first half of the term will consist of keynote lectures and assignments, the second half of the term is dedicated to the final group projects, where you will be given a challenge to solve. The lectures are supposed to give you some ideas and starting points.
Working on final projects.
Examples of past Final Projects.
Format and Schedule
There will be in-person pitch lectures as well as practical lab experiments. Lectures will be held Fridays from 13:15 to 16:30.
Registration
Students who are interested in participating in this class register via StudIP: “Mechatronic Systems - Design, Simulation and Implementation (PBL)”.
Note
Unfortunately, we have to limit the number of spots in this class. In case the number of registered students exceeds our capacity, we will go through a selection.